ME210
Wall-E
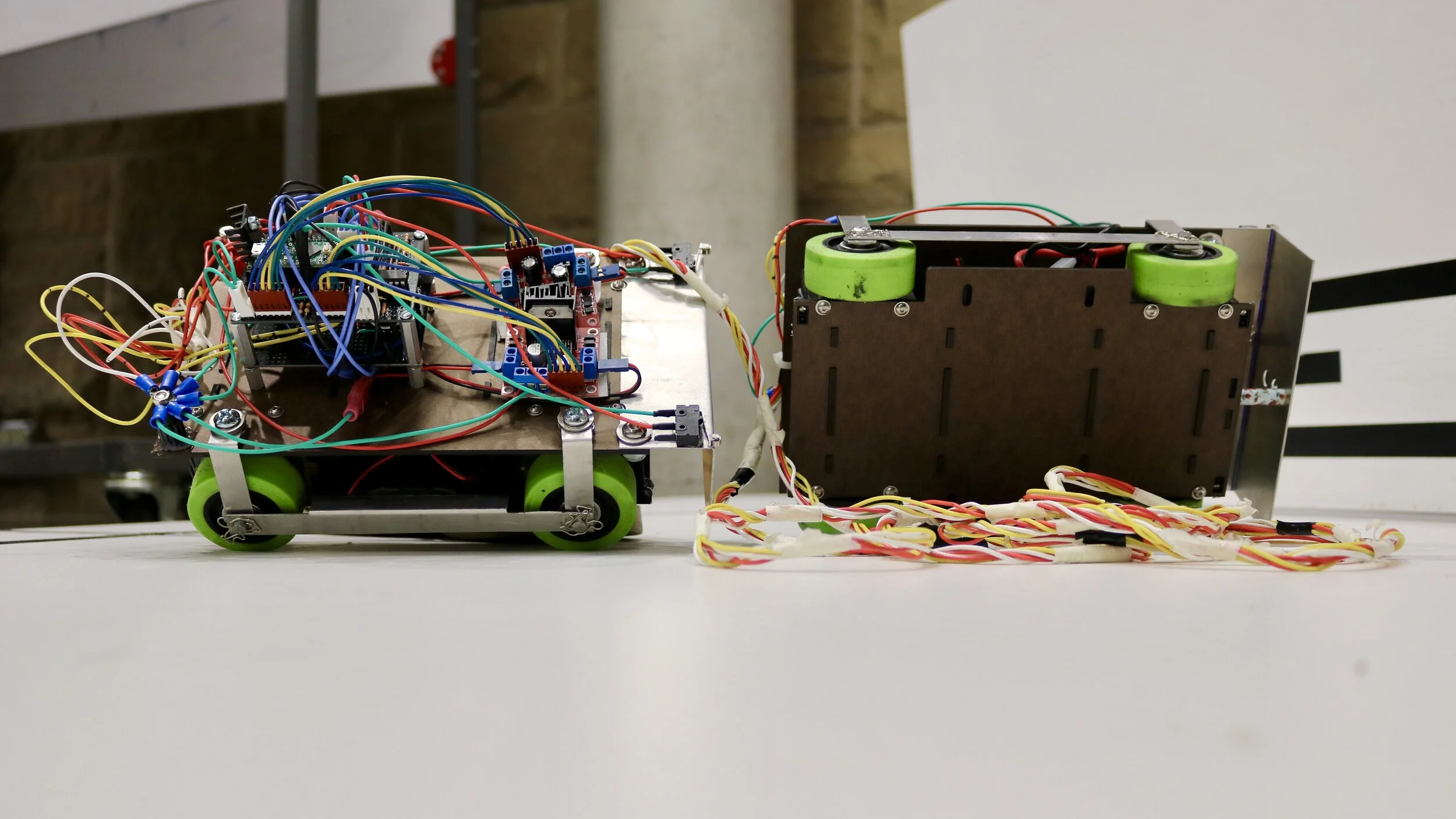
Developed from scratch in 24 days, Wall-E was our competition robot for ME210 (Intro to Mechatronics). Constrained by a $200 price limit and various mechanical and electrical rules, our robot’s mechanical system, circuits, and code were designed from scratch for the course’s end-of-term project. The project’s goal was to integrate the course’s topics into a system that could battle two opposing robots to control the greatest portion of a circle by pushing and defending shared boundary walls.















The Final Project Challenge
ME210’s final project for 2020 was to design an autonomous robot, sumōtori, that aims to take control of the maximum amount of playing field (the pi). The objective was to push the walls that define your sector away from you to maximize the area occupied by your slice of the pi. With a team of 4 students, we worked within the following constraints.
Competition Rules:
Each robot starts in a random orientation for each 2:10 round.
All parts of the robot must remain tethered throughout the round (no loose objects can fly off)
Robots must fit in a 12" x 12" x 12" cube
$200 budget cap for the built-from-scratch robots
Intentional damage to the game board or opposing robots is not allowed
Jamming opponents’ sensing capabilities is not allowed
Competition Results
Having finished the ambitious design at 6am the night before the competition, we only had a few hours of valuable testing before Wall-E faced competitors on the game board. The lack of full-system testing was apparent in the first round when the tethering cable between the robots snagged and caused one of the robots to follow the other rather than going to different sides. However, the third round showcased a successful implementation of our strategy, putting up a good fight with the eventual overall competition winner. Long story short, we weren’t reliable enough without ample testing, but are incredibly proud of being the only team to successfully implement this strategy out of 24 total teams!
Design
I predominantly worked on the mechanical design, but couldn’t have pulled this off without Marco (electrical), Effie (electrical & software), and Alex (software). For the full design write-up, head to this link for our final report for the class. The final weeks of this project took place as the COVID-19 pandemic began, so some refinement was lost, but we’re proud of what we managed to finish and hope the videos are at least a little entertaining!